PRACTICAL WORK OF PHYSICS (MECHANICS)
4. PW2 : STATIC AND DYNAMIC STUDIES OF THE OSCILLATING PENDULUM
1. Goals
- Highlight the movement of an elementary mechanical system: the oscillating pendulum.
- Determine the spring stiffness constant by two methods: static and dynamic.
- Measure the value of an unknown mass from the spring calibration curve.
2. Used Material
|
|
|---|
3. Theory
3.1. Static studyWhen a mass \( m \) is suspended from a spring, the latter lengthens and exerts a force \( \vec{F} \) on the object responsible for its elongation; this force is called spring tension.
The elongation of the spring is noted \(x_{eq} \) and is defined by: \(x_{eq} \ = \Delta l_0 = l - l_0\)
where:
- \( l_0 \) is the empty length of the spring
- \( l \) is the length of the extended spring.
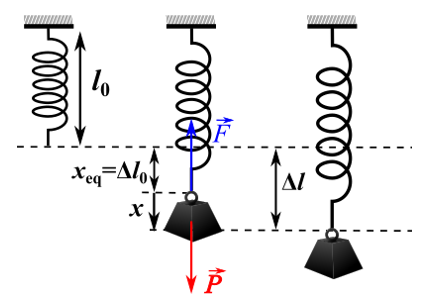
A stiffness spring \( k \), whose mass will be neglected, is suspended vertically by its upper end from a support.
By applying Newton's first law, we have :
At Equilibrium : \( \vec{P} + \vec{F}=\vec{0} \) with \( P = mg \) and \( F = k \Delta l_0 =k x_{eq} \)
From where, by projection on the axis of movement oriented vertically, we obtain:
\( P-F=0 \Rightarrow mg-k \Delta l_0 =0 \Rightarrow mg-k x_{eq} =0 \)
Thus, we have :
\( x_{eq}=\Delta l_0 = mg/k \) (1)
3.2. Dynamic studyUsing the previous spring, in addition to its first elongation due to the clinging mass, we stretch the spring with a distance (see the figure above).
By applying Newton's second law, we have : \( \vec{P} + \vec{F}=m\vec{a} \) where (\( \vec{a} \) is the acceleration vector).
By projection on the axis of movement oriented vertically, we get : \(p_x - F_x=a_x\)
Using the relations : \(F_x = k \Delta l \) with \(\Delta l =\Delta l_0 +x = x_{eq} +x \) and \( a_x =\ddot{a} \), we get:
\(mg-k(\Delta l_0 + x ) = m \ddot{x} \)
\(mg-k(\Delta x_{eq} + x ) = m \ddot{x} \)
Using the relation (1), we obtain the differential equation of the oscillatory movement: \( \ddot{x} +\frac{k}{m}x=0 \)with : \( \omega^2=\frac{k}{m} \) and \( \omega =\frac{2\pi}{T} \)
- \(\omega\) : The pulsation
- \(T\) : The period
We can thus determine the expression of the
period of the pendulum:
\( T=2\pi \sqrt{\frac{m}{k}} \) (2)
4. Experimental Procedure
4.1. Static Study
- Start by hanging the spring from the horizontal rod.
- Attach the ruler so you can take precise measurements.
- Measure the empty length \(l_0\) of the spring.
- Then you must first suspend the weight rack to be able to place the masses on it.
- Different known masses (\(m\)) of increasing values (see the table on the PW-sheet) are attached to the spring:
- At equilibrium, measure the corresponding elongations (\(X=x_{eq}\)), taking into account the mass of the weight rack.
- For each mass, take a minimum of three measurements (each student will take one measurement).
- Record your results in the table.
- To preserve the spring, you must unhook the mass directly after performing the measurement. Never leave masses attached to the spring!!.
- On a millimeter sheet, draw the calibration curve of the spring \(x_{eq}=f(m) \).
4.2.Determination of the Unknown Mass of a body
We want to determine the unknown mass \(m\) of a body from the calibration curve of the spring, for this :
- Take the device used previously and put the unknown mass to the spring.
- Measure the elongation \(x_{eq} \) of the spring.
- Use the spring calibration curve to determine the value of the mass\(m \).
4.3.Dynamic Study
- Resume the previous device. Attach a known mass \(m\) to the spring.
- Stretch the spring (taking it away from its equilibrium position) a small distance \(x\), perfectly vertically, then let go of the mass without initial velocity.
- Let the mass oscillate and measure the period of the oscillations \(T\) (read and carefully follow the measurement instructions on the sheet hung in the laboratory).
- For each mass, take a minimum of three measurements (Each student will take one measurement).
- Fill in the measurement table on the PW-sheet.
- On a millimeter sheet, draw the calibration curve of the spring \(T^2=f(m) \)