Cours 37 - Nouha Chadouli
Topic outline
-
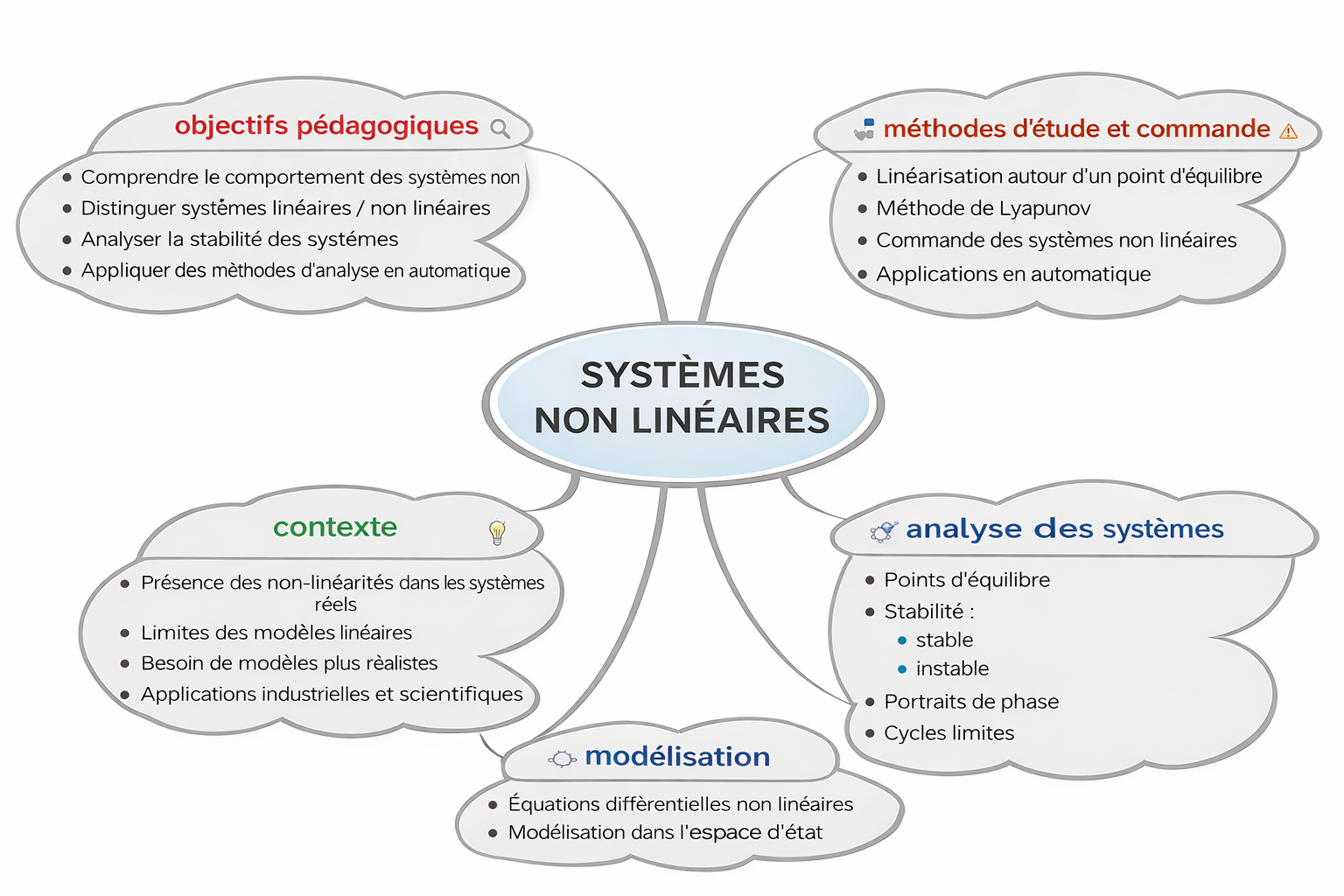
Un système non linéaire est un système dans lequel la relation entre l’entrée et la sortie n’est pas proportionnelle et ne suit pas le principe de superposition. Autrement dit, la réponse du système ne peut pas être obtenue simplement en additionnant les réponses aux différentes entrées ou en multipliant une entrée par un facteur constant. Les systèmes non linéaires contiennent souvent des puissances, des produits entre variables, des fonctions comme le sinus, l’exponentielle, ou encore des phénomènes de saturation et de seuil. À cause de ces comportements complexes, leur analyse et leur contrôle sont plus difficiles que pour les systèmes linéaires, mais ils représentent plus fidèlement la majorité des systèmes réels.
-
Cette matière vise à :
- comprendre, modéliser et analyser le comportement des systèmes non linéaires qui apparaissent dans la majorité des applications réelles.
- Elle permet d’identifier les sources de non-linéarité, d’étudier leurs effets sur la dynamique d’un système, et d’apprendre des méthodes adaptées pour leur analyse et leur commande.
- acquérir les outils théoriques et pratiques nécessaires pour traiter des phénomènes complexes tels que la saturation, les équations non linéaires, les comportements instables en calculant la jacobienne.
-
- Enseignant de la matière : Dr. Nouha CHadouli , Contact : nouha.chadouli@gmail.com
- Faculté de technologie
- Département de génie Electrique et Electronique
- Filière : Automatique
- Niveau : M1
- Unité d'enseignement : Fondamentale
- Coefficient : 3
- Crédit : 6
- Volume horaire de travail requis/semaine : 6h
- Modalité du suivi : Dimanche de 10h00 à 13h00 et jeudi 8h30 à 11h30.
- Modalité d'évaluation : TP 50%, Examen finale 50%.
- Note du CC = 100%.
-
Le cours préliminaire des systèmes non linéaires introduit les notions essentielles nécessaires pour comprendre cette discipline.
- Il commence par rappeler la différence fondamentale entre systèmes linéaires et non linéaires, en montrant pourquoi la majorité des systèmes physiques réels ne peuvent pas être décrits de façon linéaire.
- Il présente ensuite les types courants de non-linéarités, leurs effets sur le comportement dynamique, ainsi que les limites des outils classiques de l’automatique.
- L’objectif de ce premier cours est de fournir une base solide permettant d’aborder les techniques d’analyse et de commande adaptées aux systèmes non linéaires.
-
-
Opened: Thursday, 11 December 2025, 11:34 PMClosed: Monday, 15 December 2025, 11:34 PM
Si vous obtenez plus de 5 sur 10 vous pouvez passer directement au chapitre 2.
Si vous obtenez moins de 5 sur 10, vous devez consulter la chapitre 1 pour mieux vous exercer.
-